



道路信号控制的优化方法
- 来源:新能源汽车报
- 关键字:信号,人工智能,交通
- 发布时间:2015-07-29 13:31








当前,人工智能与模糊逻辑理论在交叉口信号控制系统中的应用成为研究的热点。但是,使用人工智能方法将会带来不可忽视的问题——信号控制算法的计算复杂性与计算耗时特征对硬件要求过于苛刻,这就使得众多智能控制策略只具有理论研究的意义而缺乏实际应用的可行性。
针对上述问题,本文以城市单点信号交叉口的信号优化控制作为重点研究目标,引入基于自组织映射的人工神经网络对具有时变特性的交通流模式的识别,并进一步利用减去聚类算法构建起用于识别交通流模式的模糊决策系统;针对不同的交通流模式,一方面预先建立相应的最优信号配时方案,另一方面基于极大熵原理建立交叉口的交通流估计模型,用于在线交通流OD估计。
在线执行算法阶段:根据OD估计结果,利用建立好的模糊决策系统在线检测、判别当前交通流模式,并动态地将当前的信号切换到相应的最优配时信号。由于整个算法体系的计算负荷分配到了离线阶段,这种采用“离线建立优化配时方案——在线交通流模式识别——在线信号配时动态切换”的途径具备可行性,能够完成信号的自适应调整,实现单点信号交叉口的优化控制。
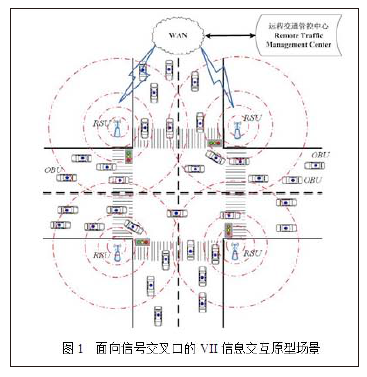
本文所依托的面向单点信号交叉口的VII系统是建立在IEEE 802.11p专用短程通信DSRC协议的基础上。为了实时采集信号交叉口的交通流数据,基于DSRC协议标准,本文定义如图1所示的信息交互网络场景。
当前的仿真研究成果表明VII系统中车与车、车与路进行无线数据交互,具有较好的可行性与可靠性:在200米的无线通信范围内,通信数据包的广播与接收率接近于100%,数据通信延时相对于交通流量监测过程可以忽略。对于本文的研究而言,单点信号交叉口的控制策略仅需要获取交叉口各个流入与流出方向的交通流数据,VII系统能够满足控制策略对交通数据采集与传输的实时性要求。
基于这样一个事实:单点信号交叉口各个流向的交通流量具有时变特征;同时,在一定时间段内(如全天、整个星期、整个月份、季度或者年度),交通流的时变模式会呈现出特有的变化规律,根据这种交通流模式变化的规律来设计信号配时方案,在一定程度上可实现信号配时的动态优化。本文提出的信号控制策略的执行过程包括两大阶段——离线阶段与在线阶段。
离线执行算法阶段
该阶段承担了控制程序大部分的计算负担,主要分为如下四大步骤:
Step1.基于VII系统的数据采集与传输过程:由于在离线阶段,建立一个合理的最优配时方案库依赖于建模数据的全面性——能够充分反映该信号交叉口的交通流模式在时间序列上的变化规律,因此,需要通过VII系统获得该路口长时段的交通流数据。
Step2.构建动态交通流OD估计模型:单点信号交叉口的动态OD矩阵(Origin-Destination Matrix)定义为一定时间间隔内每个进口车辆分配到每个出口方向的交通流数据矩阵。
Step3.交通流模式聚类以及模式识别:本文首先采用SOM神经网络对交通流进行模式聚类,根据基于极大熵模型的交通OD矩阵估计结果。
Step4.建立每一个交通流模式的最优信号配时方案:根据第三步骤获得的交通模式识别结果,本文将交通流模式数据导入交通信号配时设计软件Synchro6.0,利用该软件对每一类交通流模式进行最优信号配时,并记录每个交通模式对应的最优信号配时方案,建立起该单点信号交叉口的最优信号配时方案库。
在线执行算法阶段
完成离线阶段的算法任务,在线阶段的程序便可以对单点信号交叉口进行实时地检测与信号优化控制,具体过程如下所述:
Step1.实时检测交通流量参数:通过VII系统实时获得交叉口各个进口方向与出口方向的交通流参数;
Step2.在线进行交通流OD矩阵估计:在线求解基于极大熵原理的交通流OD估计模型,从而获得实时的交通流OD矩阵;
Step3.模糊决策系统在线识别交通模式:以交通OD矩阵作为样本空间,通过模糊决策系统在线进行模式识别,获得其对应的交通模式编号;
Step4.执行最优配时方案:根据模糊决策系统获得的当前交通流的模式编号,从该交叉口最优信号配时库中调用并执行对应的最优信号配时方案,从而完成交叉口的信号优化控制。
仿真测试结果
综上所述,模糊决策系统和信号最优配时方案库的构建过程在离线阶段完成,这种方法较好地规避了控制程序计算耗时大的缺点。此外,离线阶段的信号优化配时过程除了可以利用Synchro6.0软件实现,还可以引入专家经验,对配时方案进行人工调整。
根据仿真测试的数值结果,可以总结本文设计的信号控制策略具有如下优势:
(1)在实际应用中,控制算法所依托的交通数据信息由VII系统提供,基于VII系统容易实现车路信息的采集、传输过程;
(2)控制策略采用了神经计算原理与模糊决策技术,对强时变的交通模式具有自适应性;整个控制策略将算法划分成在线与离线阶段,其在线阶段仅需要执行交通OD矩阵估计、模式识别以及最优信号匹配任务,在线程序的计算耗时较小,可以满足信号控制的实时性要求。
本课题下一步的研究重点包括:将本文设计的信号自适应优化控制策略拓展到多个信号交叉口的协同控制过程中,并进一步将行人延误以及交通安全性纳入控制策略的改进中。
(本文为第七届中国智能交通年会优秀论文,因篇幅所限,有删节)
北京航空航天大学交通科学与工程学院 周建山 田大新 韩旭 王云鹏|文
 关注读览天下微信,
100万篇深度好文,
等你来看……
关注读览天下微信,
100万篇深度好文,
等你来看……